Crickit & Servos
O que é o CRICKIT?
- A placa CRICKIT pode ser usada em conjunto com uma placa Circuit Playground compatível (como CPX ou Bluefruit) para controlar motores mais potentes que a placa Circuit Playground não conseguiria alimentar sozinha.
- Ela também tem a capacidade de conectar sensores adicionais à CRICKIT

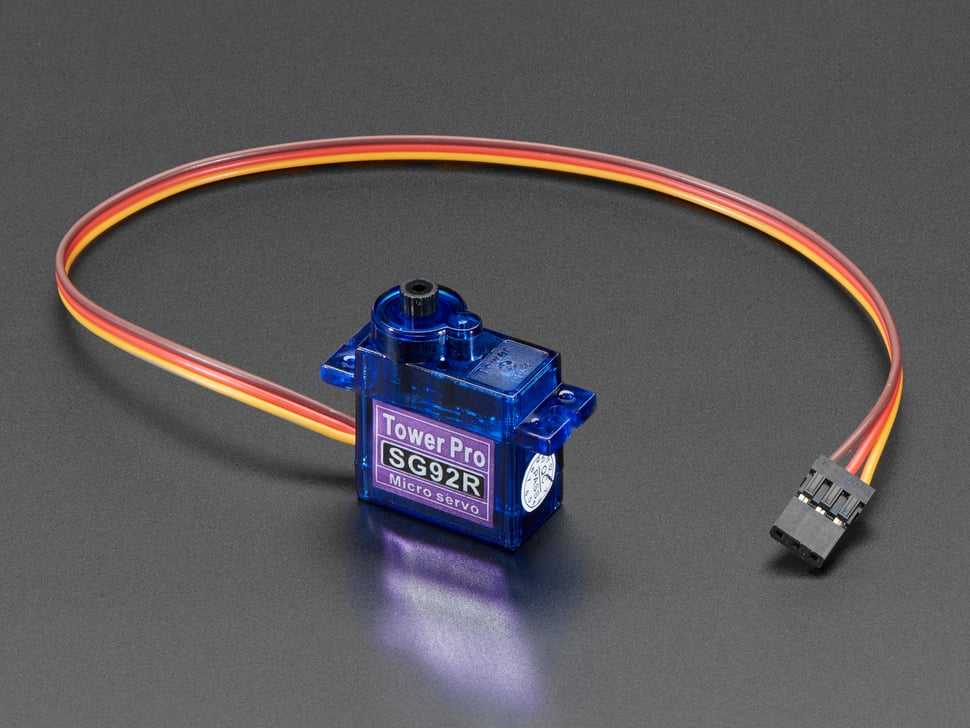
Motores Servo
Servos são motores especializados que podem ser programados para se mover em incrementos precisos. O servo que usaremos possui um sinal de controle especial que instrui o motor a mover seu braço em um ângulo específico (entre 0 e 180 graus).
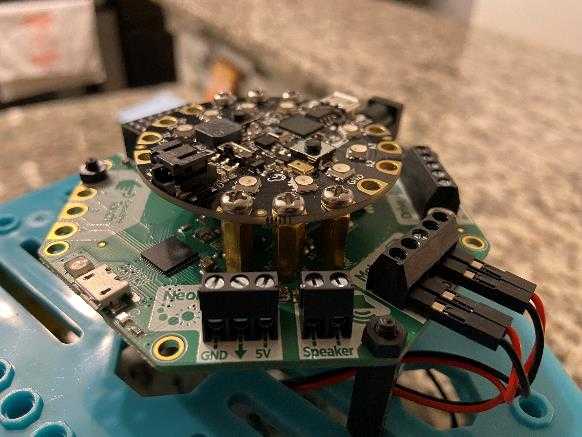
Montagem
-
Fixe a placa Circuit Playground ao CRICKIT
-
Utilize os espaçadores de metal e parafusos (dentro da embalagem do CRICKIT)
-
O micro USB na placa CP deve estar alinhado com a fonte de alimentação do CRICKIT
Programação
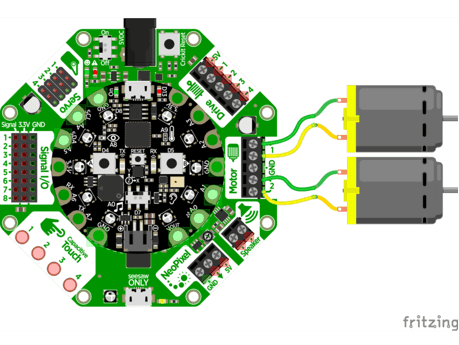
Depois de conectar o cabo do servo ao Servo 1 no CRICKIT (fio amarelo voltado para fora), o seguinte programa pode ser executado para demonstrar toda a amplitude de movimento do braço do servomotor:
from adafruit_crickit import crickit
import time
def move_and_sleep(angle):
crickit.servo_1.angle = angle
time.sleep(5)
while True:
move_and_sleep(0)
move_and_sleep(180)Agora, vamos usar o telefone para mover o braço do servo gradualmente em toda a sua amplitude de movimento. Usaremos pacotes Bluetooth do tipo ButtonPacket para receber os pressionamentos dos botões Esquerdo e Direito no Control Pad do aplicativo. Usaremos uma variável global que monitora o ângulo atual do braço do servo e implementaremos uma função adjust_angle que gira o braço na quantidade especificada:
from adafruit_crickit import crickit
from adafruit_bluefruit_connect.packet import Packet
from adafruit_bluefruit_connect.button_packet import ButtonPacket
from adafruit_ble import BLERadio
from adafruit_ble.advertising.standard import ProvideServicesAdvertisement
from adafruit_ble.services.nordic import UARTService
ble = BLERadio()
uart_service = UARTService()
advertisement = ProvideServicesAdvertisement(uart_service)
# Comece com o braço na metade do caminho
angle = 90
crickit.servo_1.angle = angle
def adjust_angle(amount):
global angle
angle = angle + amount
crickit.servo_1.angle = angle
while True:
# Continue anunciando até que outro dispositivo se conecte
ble.start_advertising(advertisement)
while not ble.connected:
pass
ble.stop_advertising()
# Continue ouvindo por pacotes enquanto estiver conectado
while ble.connected:
if uart_service.in_waiting:
packet = Packet.from_stream(uart_service)
if isinstance(packet, ButtonPacket):
if packet.pressed:
if packet.button == ButtonPacket.LEFT:
adjust_angle(20)
elif packet.button == ButtonPacket.RIGHT:
adjust_angle(-20)Desafio
Se você testar o programa acima bastante, ele eventualmente travará com uma exceção ValueError (Dica: tente girá-lo além de sua amplitude total de movimento). Adicione dois blocos if à função adjust_angle que impedirão que o ângulo saia de sua amplitude válida.